Junjie Ye
PhD Student in Computer Science
University of Southern California
Biography
🍀 I am a third-year CS PhD student at USC, advised by Prof. Yue Wang. I received my bachelor’s and master’s degrees with the highest honor from Tongji University.
My research interests lie in computer vision and robotics, where I focus on developing scalable and generalizable AI systems for perceiving and interacting with the real world.
My work is supported by the Qualcomm Innovation Fellowship 2024 and Capital One Fellowship 2025.
Download my Resumé.
- Robotics
- Foundation models
- Computer vision
-
PhD Student in Computer Science, 2023-Now
University of Southern California, USA
-
MEng in Mechanical Engineering, 2020-2023
Tongji University, Shanghai
-
BEng in Mechanical Engineering, 2016-2020
Tongji University, Shanghai
News
2025-05: Excited to join Toyota Research Institute as a research intern under the LBM team
2025-01: One paper accepted by ICRA 2025! 🤖
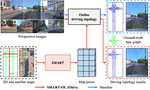
SMART is accepted by ICRA 2025!
2024-10: Capital One Fellowship 2025! 💰💰💰💰💰
I'm awarded the Capital One Fellowship 2025 in support of my research on Responsible AI Decision Making.
2024-08: One paper accepted by CoRL 2024!
RAM is accpted by the Conference on Robot Learning (CoRL) as an oral presentation!
2024-07: One paper accepted by COLM 2024!
Agent-Driver is accpted by the Conference on Language Modeling (COLM).
2024-05: Excited to join Bosch Center for Artificial Intelligence as a research intern
2024-04: Qualcomm Innovation Fellowship 2024! 💰💰💰💰💰
I'm awarded the Qualcomm Innovation Fellowship 2024! Huge thanks to my amazing teammate and highly supportive advisors.
2023-07: One paper accepted by ICCV 2023!
Our paper "PVT++: A Simple End-to-End Latency-Aware Visual Tracking Framework" is accepted by ICCV 2023 in Paris, France!
2022-11: Highest Academic Honor of Tongji 💯
I win the Academic Pioneer of Tongji (top 10 among all graduate students), as the only master's student among the awardees.
2022-11: One paper accepted by IEEE TII (IF: 12.3) ✨
Our paper "Scale-Aware Siamese Object Tracking for Vision-Based UAM Approaching" is accepted by IEEE Transactions on Industrial Informatics!
2022-10: National Scholarship of China 💰💰
I'm awarded the National Scholarship of China for Graduate Students!
2022-03: ETH Robotics Student Fellowship! 🍺🍺🍺
I am delighted to be accepted by the ETH RSF program. The acceptance rate is only 7.1%! This summer, I will be an incoming research intern in the Computer Vision and Geometry group led by Prof. Marc Pollefeys with a full grant.
2022-03: One paper accepted by CVPR 2022! 😎
Our paper "Unsupervised Domain Adaptation for Nighttime Aerial Tracking" is accepted by CVPR 2022 in New Orleans, Louisiana, USA! Great thanks to my co-authors~
2022-02: Two papers accepted by ICRA 2022! 👏
Our papers "Tracker Meets Night: A Transformer Enhancer for UAV Tracking" and "Ad2Attack: Adaptive Adversarial Attack on Real-Time UAV Tracking" are accepted by ICRA 2022 in Philadelphia (PA), USA!
2022-01: One paper accepted by IEEE RA-L! 🎆
Our paper "Tracker Meets Night: A Transformer Enhancer for UAV Tracking" is accepted by IEEE Robotics and Automation Letters!
2021-07: One paper accepted by ICCV 2021! 🌈
Our paper "HiFT: Hierarchical Feature Transformer for Aerial Tracking" is accepted by ICCV 2021!
2021-07: Two papers accepted by IROS 2021!
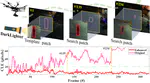
Our papers "SiamAPN++: Siamese Attentional Aggregation Network for Real-Time UAV Tracking", and "DarkLighter: Light Up the Darkness for UAV Tracking" are accepted by IROS 2021 in Prague, Czech Republic!
2021-07: Research Intern at Tech & Data Center, JD.COM
Starting from July, I am honored to be a research intern at Tech & Data Center, JD.COM Inc.
2021-06: The IEEE ICRA 2021 in Xi’an, China
I’m honored to chair the session “Aerial Robotics: Tracking” onsite ICRA’21 on behalf of Prof. C. Fu. My three co-authored papers are presented in this session.

2021-05: Our paper MRCF accepted by IEEE TIE 💯
Our paper "Multi-Regularized Correlation Filter for UAV Tracking and Self-Localization" is accepted by IEEE Transactions on Industrial Electronics!
2021-05: Research Assistent at UAV Lab, Tsinghua
Starting from early May, I am honored to be a graduate research assistant at UAV Lab, Tsinghua University, supervised by Prof. Geng Lu.

2021-02: Three papers accepted by ICRA 2021!
Our papers "Siamese Anchor Proposal Network for High-Speed Aerial Tracking", "ADTrack: Target-Aware Dual Filter Learning for Real-Time Anti-Dark UAV Tracking", and "Mutation Sensitive Correlation Filter for Real-Time UAV Tracking with Adaptive Hybrid Label", are accepted by ICRA 2021 in Xi'an, China!
2020-10: Our paper IBRI accepted by IEEE TGRS 😸
My first research work "Disruptor-Aware Interval-Based Response Inconsistency for Correlation Filters in Real-Time Aerial Tracking" is accepted by IEEE Transactions on Geoscience and Remote Sensing!
2020-07: Excellent Graduate Honor! 😆
I am awarded the Excellent Graduate Honor of Shanghai.
Featured Publications





Awards & Recognitions
- 2025, Outstanding Reviewer for CVPR 2025
- 2024, Capital One Fellowship 2025
- 2024, Qualcomm Innovation Fellowship 2024 (QIF 2024)
- 2023, USC Viterbi School of Engineering Fellowship
- 2023, Outstanding Thesis Award of Tongji
- 2023, Excellent Graduate of Shanghai (top 2%)
- 2023, Featured by Tongji University [1, 2]
- 2022, Academic Pioneer of Tongji University (10/18,584)
- 2022, National Scholarship (top 1%) for Graduate Students
- 2022, ETH Robotics Student Fellowship 2022 (ETH RSF 2022)
- 2020, Excellent Graduate of Shanghai (top 2%)
- 2019, National Scholarship (top 1%) for Undergraduate Students