Correlation Filter-Based UAV Tracking
Overview
Develop efficient and robust correlation filter (CF)-based trackers on CPU for UAV tracking in challenging scenarios. By mining temporal, spatial, and channel information properly, we have constructed several competitive tracking approaches while maintaining real-time performance on a single CPU.
Papers with code
Related works are presented as follows:
-
Introduced the temporal regularization based on historical interval response inconsistency and the disruptor-aware mechanism based on response bucketing into the CF framework, realizing competitive performance on several UAV tracking-specific benchmarks.
Disruptor-Aware Interval-Based Response Inconsistency for Correlation Filters in Real-Time Aerial Tracking in IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING
-
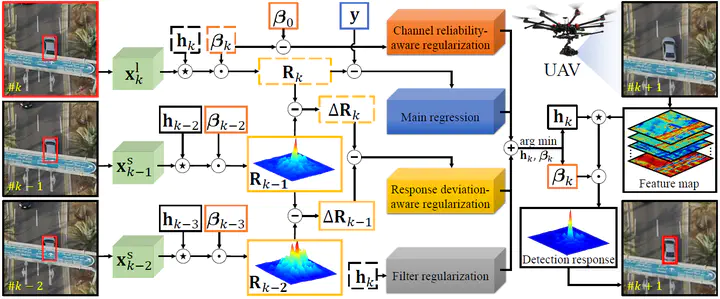
Proposed the response deviation-aware regularization and the channel reliability aware regularization to make full use of the crucial information in response maps and reliable channels. Experiments demonstrate the proposed MRCF’s superiority in numerous challenging UAV tracking scenarios. Further, an original UAV self-localization system based on the proposed tracking approach is constructed.
Multi-Regularized Correlation Filter for UAV Tracking and Self-Localization in IEEE Transactions on Industrial Electronics
-
Constructed a novel DCF-based tracker to enhance the sensitivity and resistance to mutations with an adaptive hybrid label. Considerable experiments on widely used UAV tracking benchmarks demonstrate its effectiveness.
Mutation Sensitive Correlation Filter for Real-Time UAV Tracking with Adaptive Hybrid Label in ICRA 2021
-
Proposed a scale-channel attention-based Siamese network for unmanned aerial manipulator (UAM) tracking, along with a pioneering UAM tracking benchmark.
Siamese Object Tracking for Vision-Based UAM Approaching with Pairwise Scale-Channel Attention in IROS 2022

Junjie Ye
PhD Student in Computer Science
My research interests include computer vision and robotics.