Siamese Network-Based UAV Tracking
Overview
Construct robust Siamese network-based trackers for high-performance UAV tracking. Through enhancing the anchor proposal process, feature fusion strategy, attention mechanism, etc, we have developed several robust deep learning-based trackers for UAV.
Papers with code
Related works are presented as follows:
-
Proposed the anchor proposal network (APN) for adaptive anchor proposing. Alleviated the hyper-parameters in anchor-based approaches and redundent anchors in anchor-free approaches simultaneously.
Siamese Anchor Proposal Network for High-Speed Aerial Tracking in ICRA 2021
Onboard Real-Time Aerial Tracking with Efficient Siamese Anchor Proposal Network in IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING 2021
-
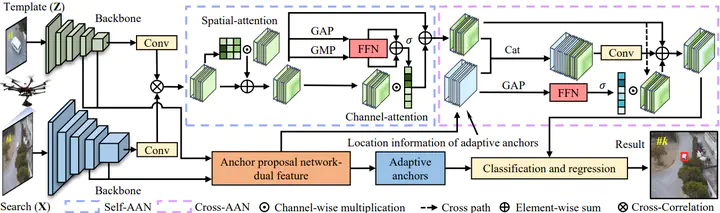
Integrated self-attention and cross-attention into SiamAPN, enhanced the perception ability for various scale objects of the proposed SiamAPN++. Evaluation on UAV tracking datasets and real-world onboard test demonstrate its effectiveness.
SiamAPN++: Siamese Attentional Aggregation Network for Real-Time UAV Tracking in IROS 2021
-
Introduced the hierarchical feature transformer into the Siamese framework to achieve interactive fusion of spatial and semantic cues.
HiFT: Hierarchical Feature Transformer for Aerial Tracking in ICCV 2021
Benchmarks

Junjie Ye
PhD Student in Computer Science
My research interests include computer vision and robotics.